CubeMars Store
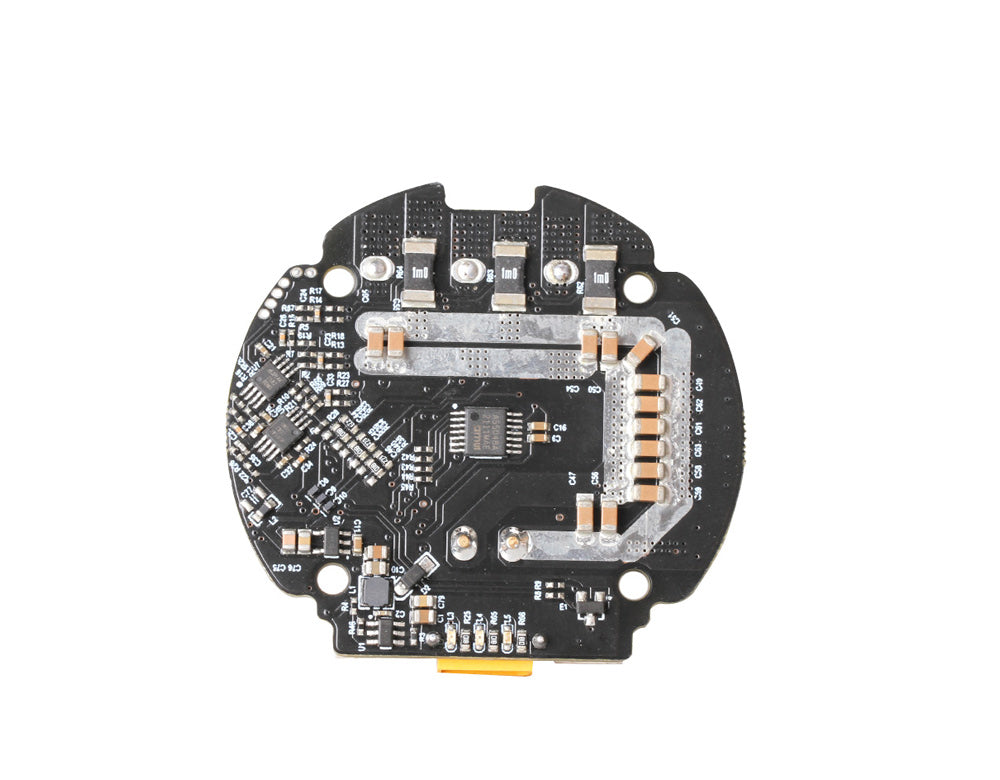
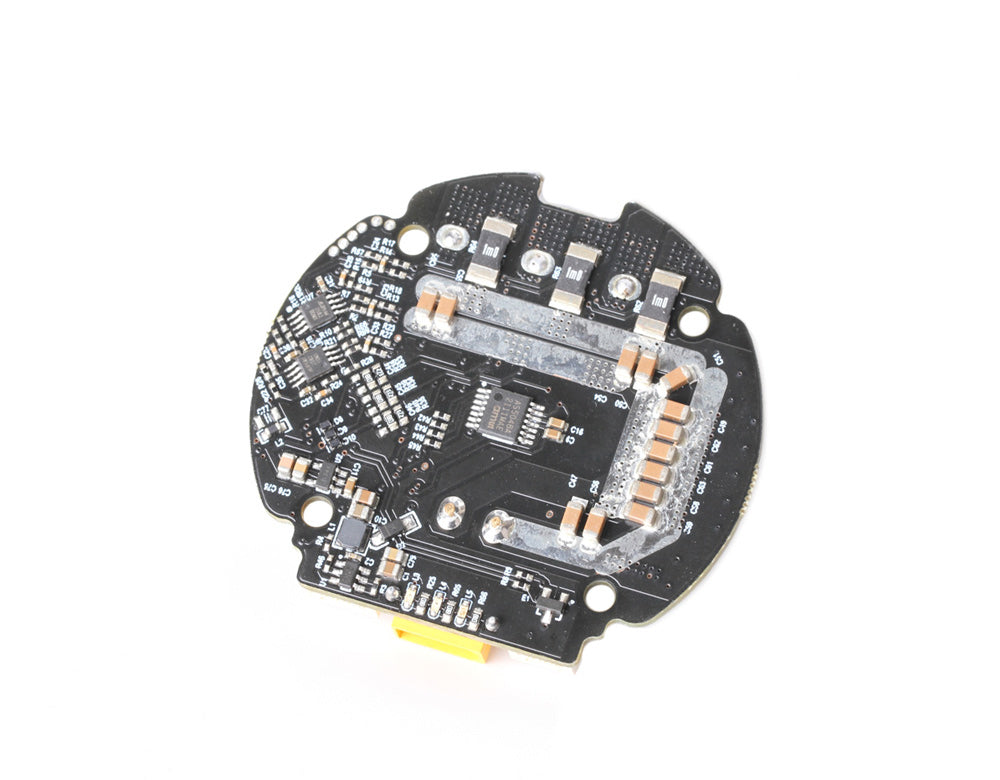
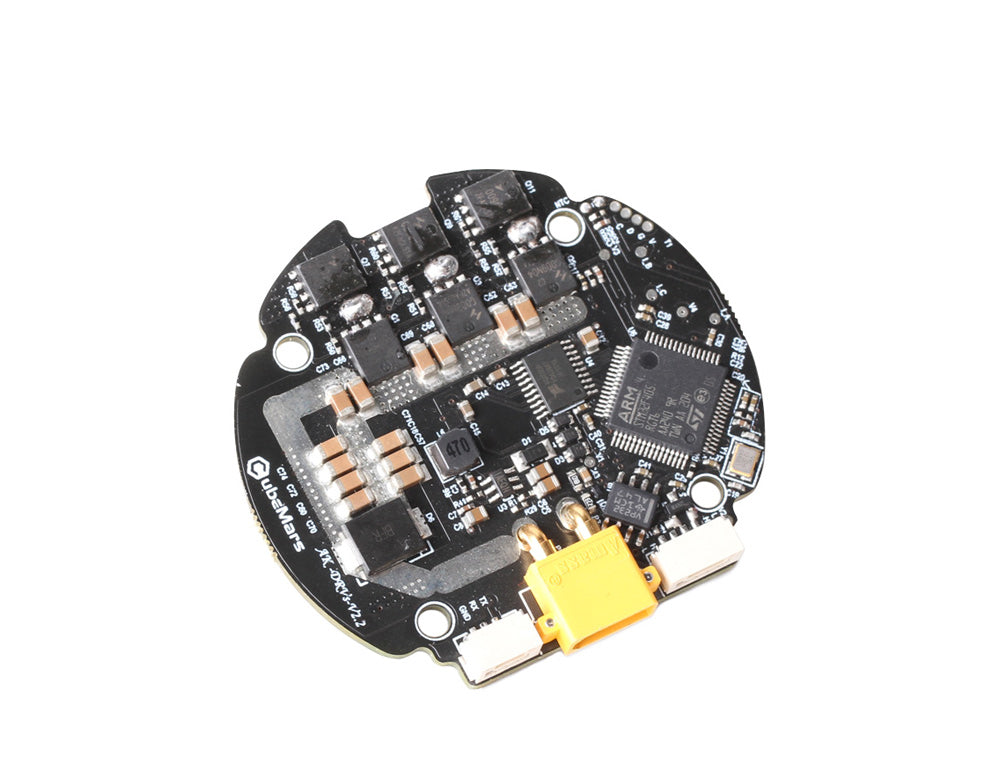
Driver-board-V2.2
Driver-board-V2.2
Couldn't load pickup availability
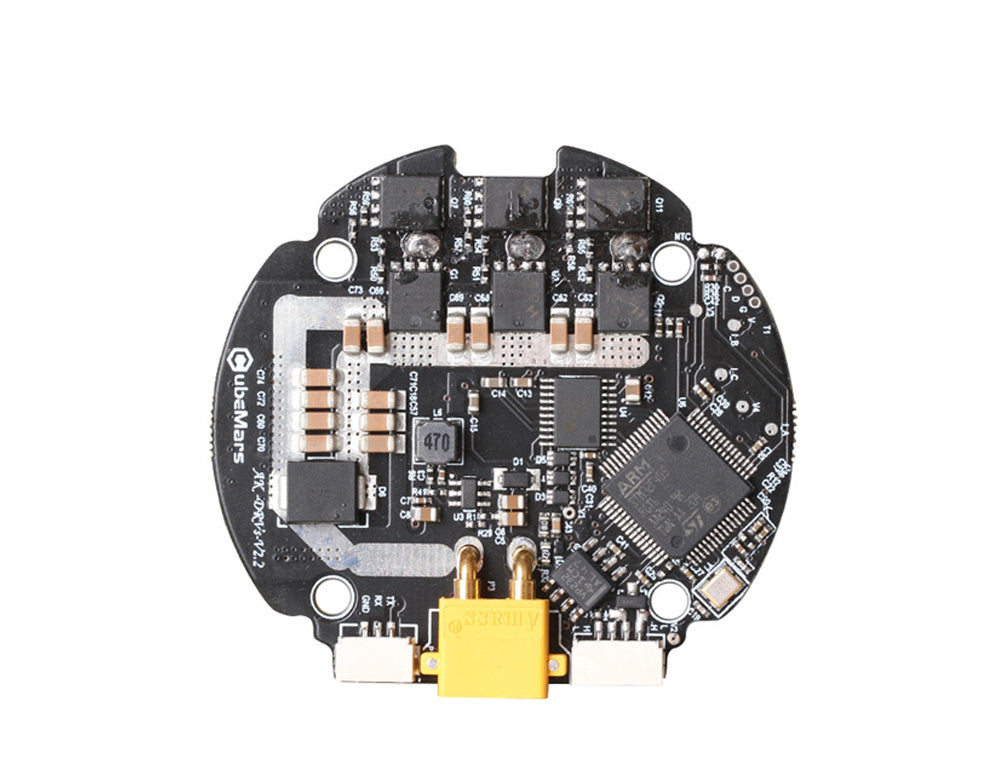
The CubeMars Driver Board-V2.2 is designed for use with the AK60-6 model integrated into the AK series. It operates at a rated voltage of 24V, has a peak current of 10A, an onboard 14-bit single-turn absolute encoder, built-in temperature sensor, and overload
and over-temperature protection functions. You can connect it to the computer using the CubeMars R-link connection tool or USB
to TTL, and utilize the CubeMars Tool PC-side debugging terminal software for motor control, debugging, and firmware upgrades.
CubeMars Tool provides users with a friendly and intuitive interface, making adjustment and programming less cumbersome and
tedious.
CubeMars Driver Board-V2.2 is specifically designed to meet the needs of robots, providing high performance, low energy
consumption, and reliability, making it an ideal solution for demanding robot applications. The board supports servo mode and
MIT motion control mode, as well as single-loop control such as speed, current, torque, brake, and position loops, and multi-loop
control like position-velocity loops.
• Rated Operating Voltage: 24V DC
• Maximum Allowable Voltage: 28V DC
• Rated Operating Current: 10A DC
• Maximum Allowable Motor Current: 30A DC
• Dimensions: 54*50 mm
• Communication Interface: CAN, Serial Port
• Software: CubeMars Tool PC-side Debugging Terminal
• Main Applications: Quadruped and Biped Robots, Exoskeletons, ROV, UGV, AGV, Drones, Collaborative Robotic Arms, and Drive
Wheel Chassis, etc.
• Plug and Play
• Motion Modes: Position, Velocity, Torque Single-Loop Control, and Position-Velocity Loop Multi-Loop Control, etc.
• Onboard 14-bit Single-Turn Absolute Encoder
For more information on control methods and debugging operations, please refer to the AK series module driver user manual,
Bilibili, and YouTube tutorials. If you have more questions about adaptation and control, feel free to consult with our online advisors!